(供稿 杨丽丽)
新华网于2020年6月24日刊登了一篇题为“无人驾驶拖拉机亮相京郊玉米无人播种显神奇”的新闻稿,报道了我校信电学院吴才聪副教授领衔的北斗农机应用研究团队在农机无人驾驶与自主作业领域取得的最新研究成果。
(无人驾驶与自主播种现场) |
北斗团队立足于我国自主建设的北斗卫星导航系统,在推动农机自动驾驶技术规模化应用的基础上,确立“立足智能化,面向无人化,攻关少人化”的智能农机研究目标,开展“一人多机”作业模式研究,以期解决“谁来种地”等农业发展面临的严峻问题。两年来,作为技术总体单位,团队联合北京市农机试验鉴定推广站、常州东风无级变速器有限公司、北京德邦大为科技股份有限公司和北京博创联动科技有限公司等企事业单位开展联合技术攻关,取得了初步的研究成果。
(各单位的部分参试人员合影) |
与国内其他相关研究比较,北斗团队选择国产无级变速拖拉机,以实现更大的动力和速度调节范围。所选用的精量播种机是国内领先的4行免耕播种机,通过提前设置株距、施肥处方图,实时获取北斗速度与位置信息可实现施肥量动态调整,并可提供堵塞和漏播报警。后期再利用无人机遥感系统监测出苗率和作物长势,将可获取全域作物数据,为田间管理提供大数据支持。
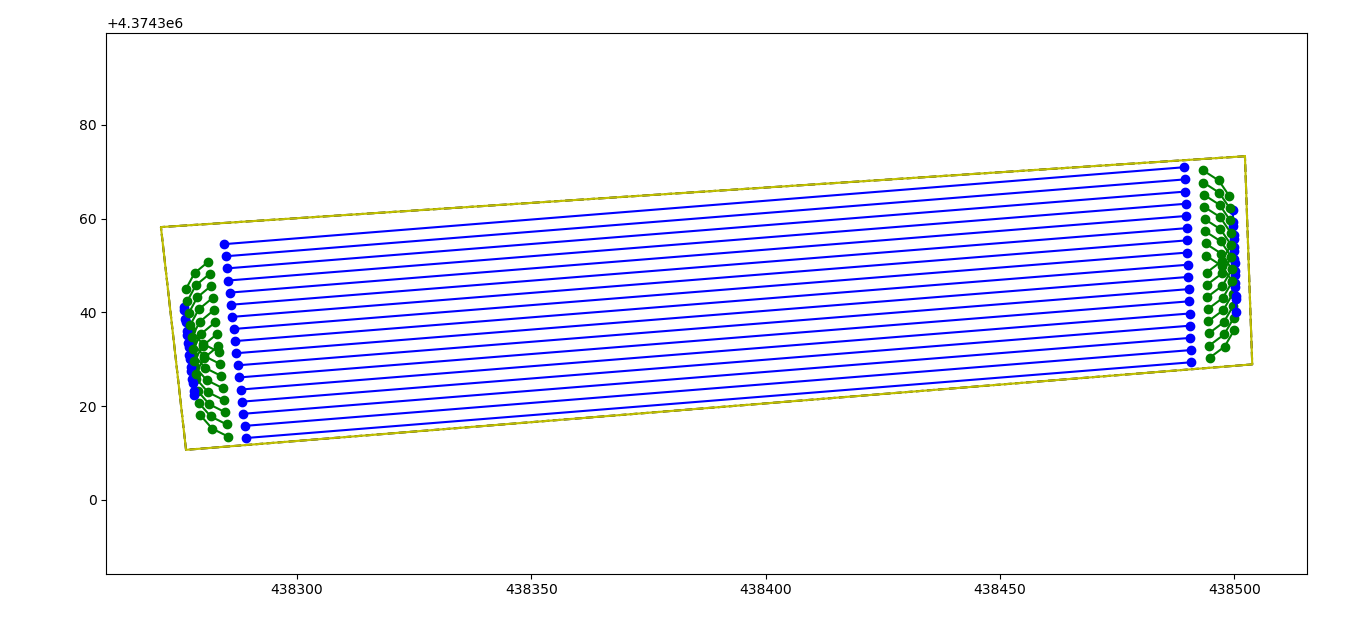
(无人驾驶路径地图) |
在无人驾驶方面,针对相对确定的农机作业场景,团队提出“按图索骥”的控制思想,通过开展农田地图测绘、行驶路径规划,使得农机可依据农田地图进行纵向速度、横向偏差、机具升降、播种开闭等精准控制。40亩地的玉米无人播种试验表明,实际效果和事先规划完全一致,行驶精度控制在±3 cm,株距均匀,播深精准,优于人工驾驶播种的相应指标。
(部分师生合影) |
突如其来的新冠肺炎给研究和试验造成了极大的困难,但团队师生不抱怨、不退缩,想方设法克服疫情影响。在疫情初期,师生们通过网络讨论技术方案,夜以继日地编写路径规划、障碍识别和车辆控制等算法;在疫情缓解后,相关研究生立即申请返京,吃住在大兴区榆垡镇农业技术推广站和周边民宿,开展地图测绘、土壤采样、设备安装和机组调试。北京疫情二次发生后,陈智博等四位研究生在做好疫情防控的前提下,不辞辛劳,坚守阵地,直至圆满完成无人驾驶整地和播种作业。
(博士生陈智博践行将论文写在大地上) |
本次试验的农机无人作业技术是北斗团队参与的国家重点研发计划“协同精密定位技术”项目的重要研究内容。团队师生深知农机无人作业是一项复杂的系统工程,要求针对农业生产系统制订全新的标准规范和管理模式,其实现有赖于全行业的共同努力。为此,2019年吴才聪副教授应邀向农业农村部有关领导提供咨询意见时,提出“针对我国劳动力数量、质量和成本的不确定性,探索研究一人多机技术,使农机合作社不雇人或少雇人”的发展策略。
这次试验的成功为未来团队在农机无人作业方面的科研攻关提供了宝贵的经验。
电话:010-62736746
邮箱:eic@cau.edu.cn
地址:北京市海淀区清华东路17号
邮编:100083

微信关注
©2017 信息与电气工程学院 校备案号:308_19034