近日,国家重点研发计划项目“北斗精准导航与高分辨率遥感集成技术及区域综合应用示范”通过了国家科技部高技术中心组织的现场中期检查。国家科技部高技术中心副主任卞曙光、副处长徐泓、主管金馨出席会议,参与项目进展的评估和讨论。中国农业大学承担项目“无人农机全场景智能导航控制技术研发”子课题的工作,翟卫欣副教授担任子课题负责人。
会议现场
由北京航空航天大学教授施闯、国家卫星气象中心研究员卢乃锰、中国交通通信信息中心研究员刘建、北京师范大学教授潘耀忠和北斗导航位置服务有限公司研究员曹红杰组成的专家组在山东省邹平无人农场示范基地进行了现场中期检查。专家组审阅了有关材料,听取了项目组的中期进展汇报,现场考察了中农北斗团队研发的无人驾驶拖拉机的作业情况,一致认为无人驾驶拖拉机的控制精度达到了中期指标要求,且实现了机库-机耕道-农田的全场景无人作业,完成了任务书中期规定的研究内容。


检查现场
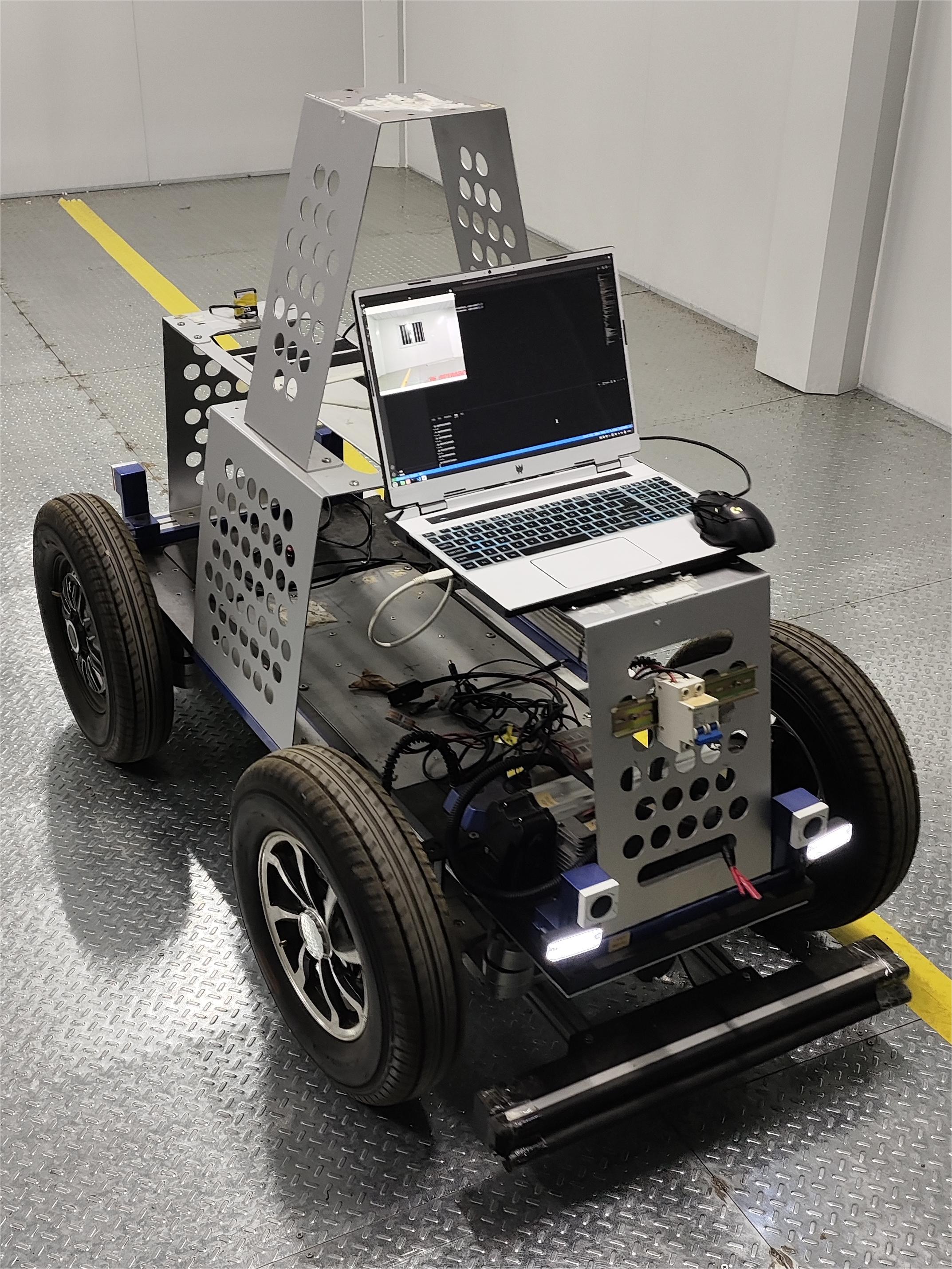
多年来,中农北斗团队一直致力于无人农机技术的研究与发展。不仅成功完成了基于SF-2104动力换向拖拉机的深松无人作业,还推动了DF-1204、DF-2204无级变速拖拉机在播种、耕整地等方面的应用。为了进一步拓展研究领域,团队于2023年在烟台研究院修建机库,运送云乐线控底盘小车、DF-2204无级变速拖拉机以及大疆经纬M300 RTK无人机至烟台研究院,并积极申请了一块试验田,用于进行无人农机试验与实践。


烟院机库与试验田
在项目的前期阶段,团队在烟院开展无人驾驶拖拉机研究。通过在DF-2204无级变速拖拉机上实现了横纵向控制,成功完成了套圈作业;并进行巡线跟踪测试,开展自动泊机试验,完成了拖拉机机库内自动泊机任务。在烟院进行的无人驾驶拖拉机研究解决了项目中遇到的重大问题,为顺利通过项目的中期检查做出了显著的贡献。
烟院试验场景